Metric rectification using the images of two circles
perform a metric rectification from two images of a circles the results are not accurate, but it is an example of conic fitting Luca Magri Politecnico di Milano 2021
Contents
load the image
clear; close all; img = imread('images/imgCircles3.jpg'); img = imresize(img,1); figure; imshow(img);
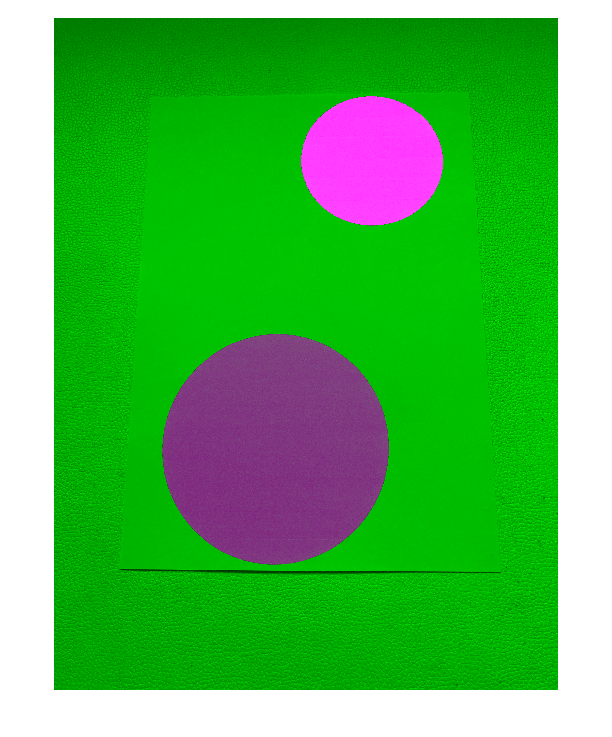
preprocessing
imgGray = rgb2gray(img); % morphological operators th = 90; bw = imgGray < th; se = strel('disk',5); bw = imclose(bw,se); bw = imopen(bw,se);
get the two biggest connected components
CC = bwconncomp(bw); numPixels = cellfun(@numel,CC.PixelIdxList); [~, sortedIdx] = sort(numPixels,'descend'); bw = double(bw); for i =1:numel(numPixels) currentPixels = CC.PixelIdxList{sortedIdx(i)}; if(i==1 || i==2) bw(currentPixels) = i; else bw(currentPixels) = 0; end end figure; imshow(imfuse(img,double(bw)));
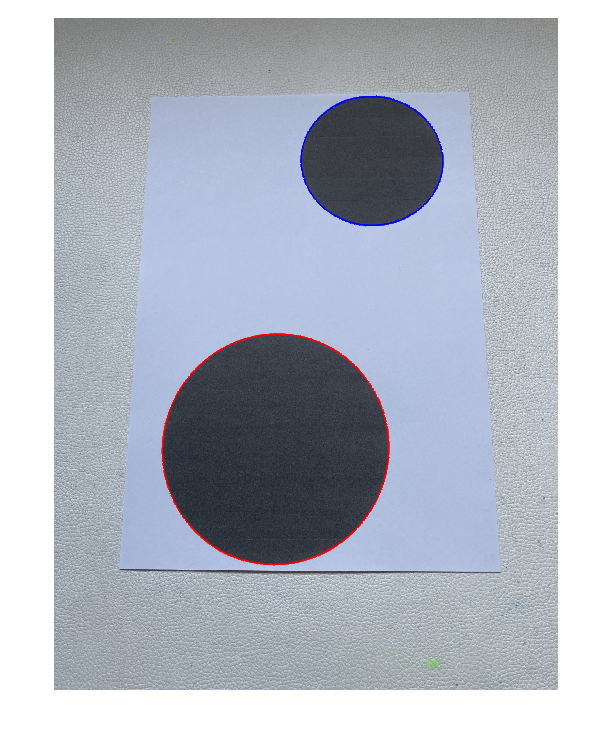
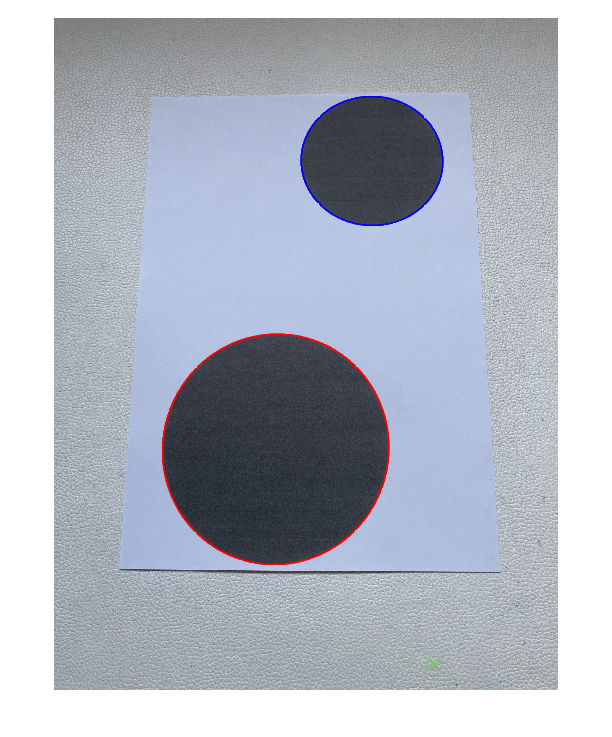
from connected component to boundaries
B = bwboundaries(bw ==1,'noholes'); ellipse1.x = B{1}(:,2); ellipse1.y = B{1}(:,1); B = bwboundaries(bw ==2,'noholes'); ellipse2.x = B{1}(:,2); ellipse2.y = B{1}(:,1); figure; imshow(img); hold all; plot(ellipse1.x, ellipse1.y, 'r', 'LineWidth', 2); plot(ellipse2.x, ellipse2.y, 'b', 'LineWidth', 2);
form boundaries to conics
A1 =[ ellipse1.x.^2 ellipse1.x.*ellipse1.y ellipse1.y.^2 ellipse1.x ellipse1.y ones(size(ellipse1.x))]; [~,~,v1]=svd(A1); cc1 = v1(:, end); cc1 = cc1./norm(cc1); [a1, b1, c1, d1, e1, f1] = deal(cc1(1),cc1(2),cc1(3),cc1(4),cc1(5),cc1(6)); C1=[a1 b1/2 d1/2; b1/2 c1 e1/2; d1/2 e1/2 f1]; A2 =[ ellipse2.x.^2 ellipse2.x.*ellipse2.y ellipse2.y.^2 ellipse2.x ellipse2.y ones(size(ellipse2.x))]; [~,~,v2]=svd(A2); cc2 = v2(:, end); cc2 = cc2./norm(cc2); [a2, b2, c2, d2, e2, f2] = deal(cc2(1),cc2(2),cc2(3),cc2(4),cc2(5),cc2(6)); C2 =[a2 b2/2 d2/2; b2/2 c2 e2/2; d2/2 e2/2 f2]; % sanity check figure; imshow(img); hold all; plot_conic(C1,[ellipse1.x, ellipse1.y]','r'); plot_conic(C2,[ellipse2.x, ellipse2.y]','b');
intersect ellipses
syms 'x'; syms 'y'; eq1 = a1*x^2 + b1*x*y + c1*y^2 + d1*x + e1*y + f1; eq2 = a2*x^2 + b2*x*y + c2*y^2 + d2*x + e2*y + f2; eqns = [eq1 ==0, eq2 ==0]; S = solve(eqns, [x,y]);
solutions
s1 = [double(S.x(1));double(S.y(1));1]; s2 = [double(S.x(2));double(S.y(2));1]; s3 = [double(S.x(3));double(S.y(3));1]; s4 = [double(S.x(4));double(S.y(4));1];
II = s3; JJ = s4; imDCCP = II*JJ' + JJ*II'; imDCCP = imDCCP./norm(imDCCP);
compute the rectifying homography
[U,D,V] = svd(imDCCP); D(3,3) = 1; A = U*sqrt(D);
H = inv(A); % rectifying homography tform = projective2d(H'); J = imwarp(img,tform); figure; imshow(J); axis equal; imwrite(J,'images/imgCirclesRectified.JPG');