Affine rectification from fitted vp
perform an affine rectification of an image. Vanishing points are estimated from families of parallel lines.Then the line at infinity is fitted to the vanishing points. The homography that maps the line at infinity to its canonical form: (0: 0: 1) rectify the image up to an affinity transformation.
Luca Magri Politecnico di Milano 2021
Contents
load the image
clear; close all; img = imread('images/img1.JPG'); figure; imshow(img);

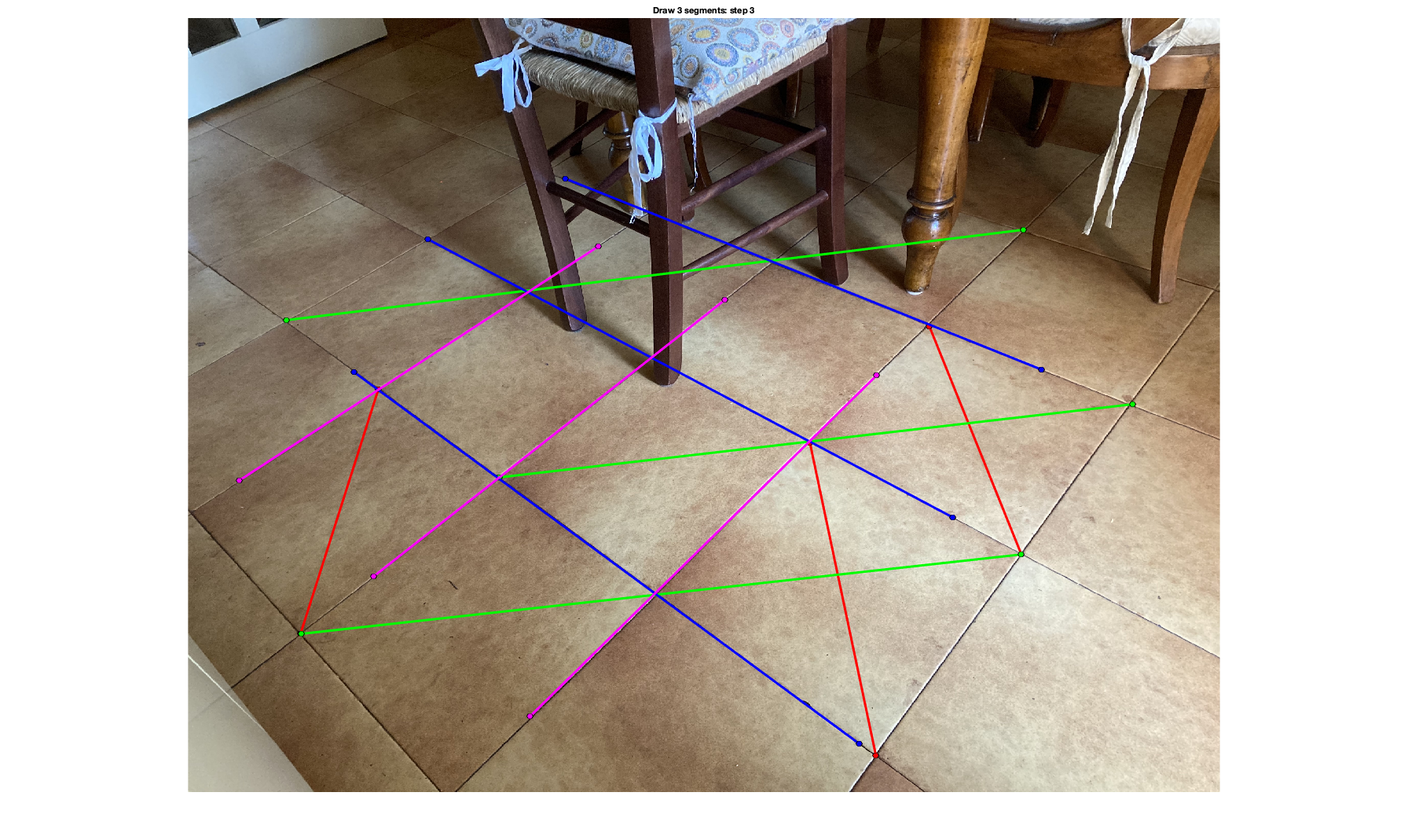
interactively select f families of segments that are images of 3D parallel lines
f = 4; % number of families of parallel lines numSegmentsPerFamily = 3; parallelLines =cell(f,1); % store parallel lines fprintf(['Draw ', num2str(f) , ' families of parallel segments\n']); col = 'rgbm'; for i = 1:f count = 1; parallelLines{i} = nan(numSegmentsPerFamily,3); while(count <=numSegmentsPerFamily) figure(gcf); title(['Draw ', num2str(numSegmentsPerFamily),' segments: step ',num2str(count) ]); segment1 = drawline('Color',col(i)); parallelLines{i}(count, :) = segToLine(segment1.Position); count = count +1; end fprintf('Press enter to continue\n'); pause end
Draw 4 families of parallel segments Press enter to continue Press enter to continue Press enter to continue Press enter to continue
compute the vanishing points
V = nan(2,f); for i =1:f A = parallelLines{i}(:,1:2); B = -parallelLines{i}(:,3); V(:,i) = A\B; end
compute the image of the line at infinity
imLinfty = fitline(V); imLinfty = imLinfty./(imLinfty(3)); figure; hold all; for i = 1:f plot(V(1,i),V(2,i),'o','Color',col(i),'MarkerSize',20,'MarkerFaceColor',col(i)); end hold all; imshow(img);

build the rectification matrix
H = [eye(2),zeros(2,1); imLinfty(:)']; % we can check that H^-T* imLinfty is the line at infinity in its canonical % form: fprintf('The vanishing line is mapped to:\n'); disp(inv(H)'*imLinfty);
The vanishing line is mapped to:
0
0
1
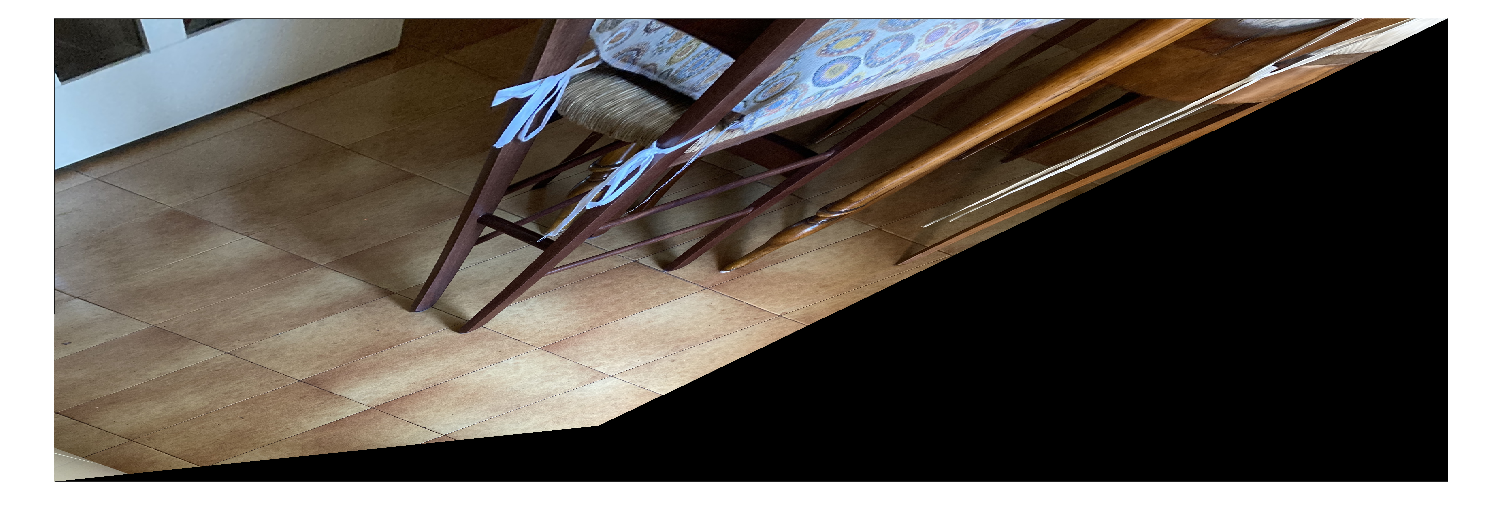
rectify the image and show the result
tform = projective2d(H'); J = imwarp(img,tform); figure; imshow(J); imwrite(J,'images/affRect_vp.JPG'); function [l] = segToLine(pts) % convert the endpoints of a line segment to a line in homogeneous % coordinates. % % pts are the endpoits of the segment: [x1 y1; % x2 y2] % convert endpoints to cartesian coordinates a = [pts(1,:)';1]; b = [pts(2,:)';1]; l = cross(a,b); l = l./norm(l); end