Contents
A naive way to stitch two images
Let's load a pair of images, taken from the same point of view. We want to stitch them.
close all clc addpath('../')
im1=imread('im1.jpg'); im2=imread('im2.jpg'); im1f=figure; imshow(im1); im2f=figure; imshow(im2);


Data entry
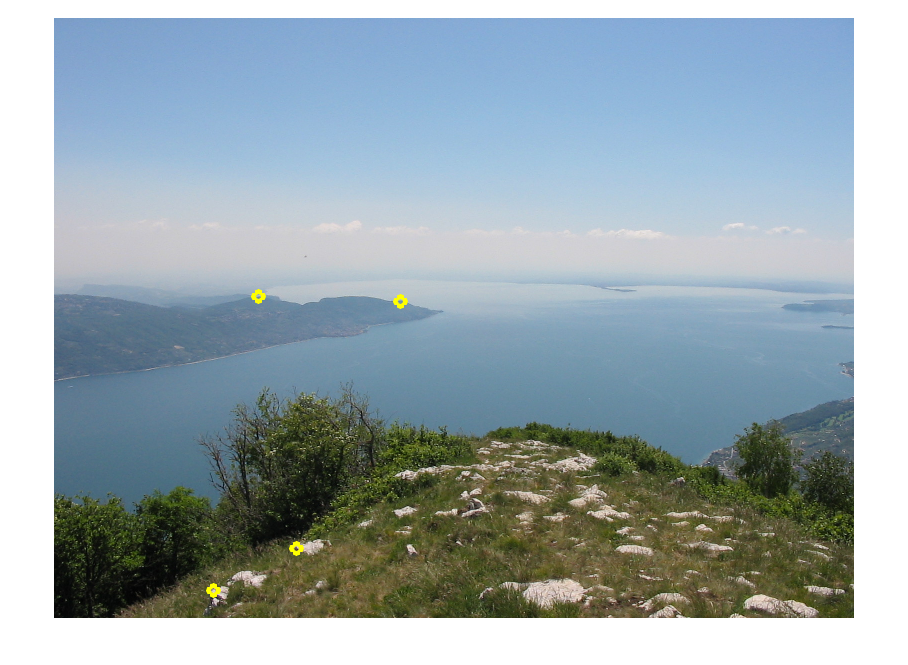
We manually :-( pick four points in the first image, and four corresponding points on the second image
figure(im1f), [x1,y1]=getpts figure(im1f), hold on, plot(x1,y1,'oy', 'LineWidth', 5, 'MarkerSize', 10); figure(im2f), [x2,y2]=getpts figure(im2f), hold on, plot(x2,y2,'oy', 'LineWidth', 5, 'MarkerSize', 10);
x1 =
1.0e+03 *
1.1560
1.3240
1.2440
1.5480
y1 =
952.0000
886.0000
374.0000
386.0000
x2 =
320.0000
486.0000
410.0000
694.0000
y2 =
1146
1062
558
568

Homography estimation using our codes
a = [x1(1); y1(1); 1]; b = [x1(2); y1(2); 1]; c = [x1(3); y1(3); 1]; d = [x1(4); y1(4); 1]; X = [a, b, c, d]; ap = [x2(1); y2(1); 1]; bp = [x2(2); y2(2); 1]; cp = [x2(3); y2(3); 1]; dp = [x2(4); y2(4); 1]; XP = [ap, bp, cp, dp]; % apply preconditioning to ease DLT algorithm % Tp and TP are similarity trasformations [pCond, Tp] = precond(X); [PCond, TP] = precond(XP); % estimate the homography among transformed points Hc = homographyEstimation(pCond, PCond); % adjust the homography taking into account the similarities H = inv(TP) * Hc * Tp; % the trasnformation to be applied
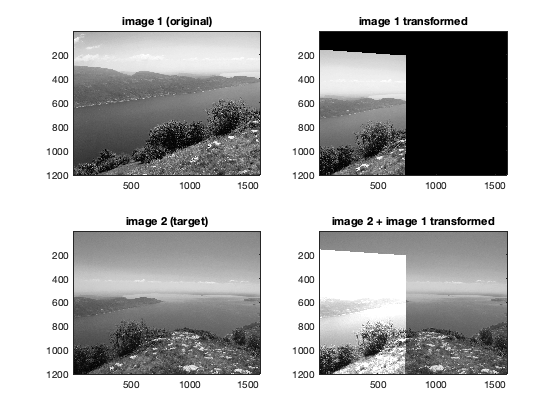
Let's see the result
% apply the homography to the red channel of the first image % J is the transformed image rendered in a canvas with the same dimension % of image2 J = imwarpLinear(im1(:,:,1), H, [1, 1, 1600, 1200]); figure(23); subplot(2,2,1) imagesc(im1(:,:,1)), title('image 1 (original)'), colormap gray; subplot(2,2,2) imagesc(J), title('image 1 transformed'), colormap gray; subplot(2,2,3) imagesc(im2(:,:,1)), title('image 2 (target)'), colormap gray; subplot(2,2,4) imagesc(im2(:,:,1)+ uint8(J)), title('image 2 + image 1 transformed'), colormap gray; % we have lost part of the image content using imwarplinear!
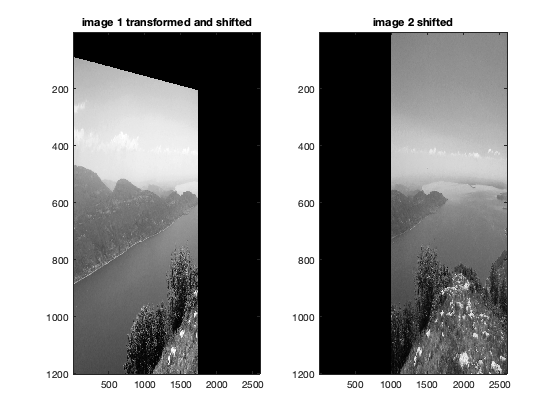
Let's try to see both the images
% create an homography that shift the image to the right shift = 1000; H2 = [1 0 shift; 0 1 0; 0 0 1]; im2_shifted = imwarpLinear(im2(:,:,1), H2, [1, 1, size(im2,2) + shift, size(im2,1)]); % now we have to transform im1 and we need to account for the shifting J_shifted = imwarpLinear(im1(:,:,1), H2*H, [1, 1, size(im2,2) + shift, size(im2,1)]); figure(26) subplot(1,2,1) imagesc(J_shifted), title('image 1 transformed and shifted'), colormap gray; subplot(1,2,2) imagesc(im2_shifted), title('image 2 shifted'), colormap gray;
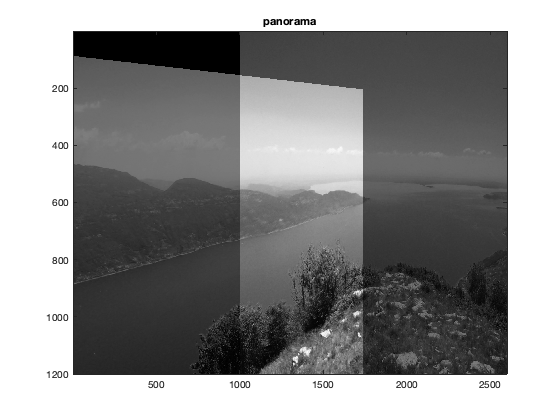
blend the images
figure(225), imagesc(J_shifted + im2_shifted), title('panorama'), colormap gray;
Homography estimation
The matlab maketform function returns an homography given four points and their transformed ones, which is the minimal information which defines an homography. A naive algorithm which solves this problem is in "Multiple View Geometry", page 35. Better algorithms are in chapter 4 of the same book.
T=maketform('projective',[x2 y2],[x1 y1]);
T.tdata.T
ans =
0.7130 -0.0620 -0.0002
-0.0055 0.9175 -0.0000
859.3463 -141.2110 1.0000
this is the computed homography, a 3x3 matrix. It transforms the second image to match the first.
Transformations
Let's not transform the images, and place both on the same reference frame. There are some hacks with xdata and ydata here, check the imtransform docs if you are interested in the details.
[im2t,xdataim2t,ydataim2t]=imtransform(im2,T); % now xdataim2t and ydataim2t store the bounds of the transformed im2 xdataout=[min(1,xdataim2t(1)) max(size(im1,2),xdataim2t(2))]; ydataout=[min(1,ydataim2t(1)) max(size(im1,1),ydataim2t(2))]; % let's transform both images with the computed xdata and ydata im2t=imtransform(im2,T,'XData',xdataout,'YData',ydataout); im1t=imtransform(im1,maketform('affine',eye(3)),'XData',xdataout,'YData',ydataout);
Visualizations
now im1t and im2t are equal-size images ready to be merged. Let's average them
ims=im1t/2+im2t/2; figure, imshow(ims)

if we want to better analyze the match quality, let's compute the difference of the two images and look at the absolute value
imd=uint8(abs(double(im1t)-double(im2t)));
% the casts necessary due to the images' data types
imshow(imd);

you can get a decent composite by picking the maximum at each pixel: however, note that the seam is visible, because the exposure in the two images is not equal. Real stitching software compensates for this.
ims=max(im1t,im2t); imshow(ims);

Notes
real stitching software do a lot more than this. And, they pick matching points automatically. :-) The full panorama (which is from Cima Comer, on Lago di Garda) is found here: http://www.leet.it/home/lale/files/Garda-pano.jpg It was made using Hugin and panotools: http://hugin.sourceforge.net/ Note that exposure has been compensated between images. Also, curved image boundaries suggest that not only homographies were compensated to rectify the image, but also higher-order distorsions.
{kind=link}