Contents
A simple geometrical construction with 2D homogeneous coordinates
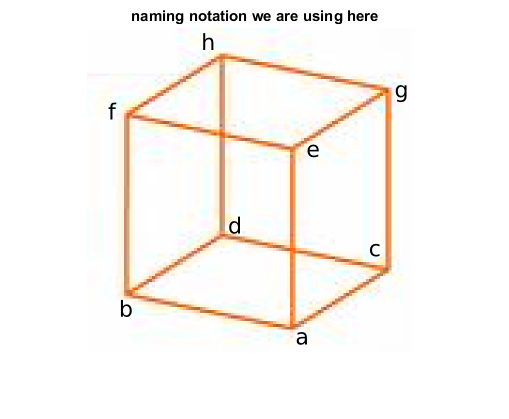
Our goal is to complete the drawing of a cuboid. We use need six vertices on the contour of the cuboid.
credits Alessandro Giusti alessandrog@idsia.ch
Giacomo Boracchi December 12, 2016
close all
clear
clc
Data input
FNT_SZ = 20; im=imread('bluecube.jpg'); figure(1), imshow(im); % keeps on drawing multiple elements on the same figure hold on; % select six visible verteces of the cube [x y]=getpts; plot(x,y,'or','MarkerSize',12); % take the points in homogenous coordinates a=[x(1) y(1) 1]'; text(a(1), a(2), 'a', 'FontSize', FNT_SZ, 'Color', 'w') b=[x(2) y(2) 1]'; text(b(1), b(2), 'b', 'FontSize', FNT_SZ, 'Color', 'w') f=[x(3) y(3) 1]'; text(f(1), f(2), 'f', 'FontSize', FNT_SZ, 'Color', 'w') h=[x(4) y(4) 1]'; text(h(1), h(2), 'h', 'FontSize', FNT_SZ, 'Color', 'w') g=[x(5) y(5) 1]'; text(g(1), g(2), 'g', 'FontSize', FNT_SZ, 'Color', 'w') c=[x(6) y(6) 1]'; text(c(1), c(2), 'c', 'FontSize', FNT_SZ, 'Color', 'w') figure(2), imshow(imread('simplecube-letters.png')), title('naming notation we are using here'); % call figure 1 back (we have to draw on this) figure(1),
Warning: Image is too big to fit on screen; displaying at 50%

Finding and plotting vanishing points
lAB= cross(A,B) where A and B are points computes the line lAB passing through AB (the 3 coefficient vector)
D = cross(lAB, lGH), where lAB and lGH are the 1x3 coefficient vectors yield the intersection of the two lines
to determine wether a point A belongs to a line l it's enough to check whether the scalar product between A and l is zero, i.e., A' * l == 0
vab=cross(cross(a,b),cross(h,g)); vac=cross(cross(a,c),cross(f,h)); vae=cross(cross(b,f),cross(c,g)); % points have to be normalized before visualizing them on the plane vab=vab/vab(3); vac=vac/vac(3); vae=vae/vae(3); % these are quite far from the image region plot(vab(1),vab(2),'x'); plot(vac(1),vac(2),'x'); plot(vae(1),vae(2),'x');

Finding the missing points (d and e)
d=cross(cross(b,vac),cross(c,vab)); d=d/d(3); e=cross(cross(g,vac),cross(f,vab)); e=e/e(3);
Drawing
we can now finally draw the cube.
myline=[a';b';d';c';a']; line(myline(:,1),myline(:,2),'LineWidth',5); myline=[e';f';h';g';e']; line(myline(:,1),myline(:,2),'LineWidth',5); myline=[a';e']; line(myline(:,1),myline(:,2),'LineWidth',5); myline=[b';f']; line(myline(:,1),myline(:,2),'LineWidth',5); myline=[c';g']; line(myline(:,1),myline(:,2),'LineWidth',5); myline=[d';h']; line(myline(:,1),myline(:,2),'LineWidth',5);

Rectify a face
We can also transform the image so that a face becomes a square.
T = maketform('projective',[a(1:2)';b(1:2)';f(1:2)';e(1:2)'],[0 0;300,0;300,300;0,300]);
figure, imshow(imtransform(im,T));
Warning: Image is too big to fit on screen; displaying at 33%
Such transformation is called homography, and will be presented later during the Image Analysis and Synthesis course. Still, it is a linear transformation, so it has the same form of the simpler 2D transformations (translations and rotations) which have already been introduced, a 3x3 matrix:
T.tdata.T
ans = -0.5544 1.0662 0.0006 -0.2241 -0.6885 -0.0003 564.7613 223.9981 1.0000