Contents
- manually select points
- draw the points over the image
- compute the parameters of a few lines equation as the lines passing through 2 points
- check incidence relation
- intersect these lines with the image borders
- compute the angles on these images
- Verify the proporty any linear combination of a,b belongs to lab
- intersect parallel lines
clear close all clc % Goal: plot a few lines overlying this checkerboard % load a checkerboard image I = imread('checkerboard.png'); FNT_SZ = 28;
manually select points
figure(1), imshow(I); hold on; [x, y] = getpts(); % save points in the homogeneous cooridnate. It is enough to set to 1 the third component a = [x(1); y(1); 1]; b = [x(2); y(2); 1]; c = [x(3); y(3); 1]; d = [x(4); y(4); 1];
draw the points over the image
text(a(1), a(2), 'a', 'FontSize', FNT_SZ, 'Color', 'b') text(b(1), b(2), 'b', 'FontSize', FNT_SZ, 'Color', 'b') text(c(1), c(2), 'c', 'FontSize', FNT_SZ, 'Color', 'b') text(d(1), d(2), 'd', 'FontSize', FNT_SZ, 'Color', 'b')
compute the parameters of a few lines equation as the lines passing through 2 points
lab = cross(a, b); % this is the reference lad = cross(a, d); % orthogonal to lab lac = cross(a, c); % 45 degrees with lac lcd = cross(c, d); % parallel to lab
check incidence relation
a' * lab % this should be zero when a \in lab c' * lcd % indeed, this exactly corresponds to lcd(1)*c(1) + lcd(2)*c(2) + lcd(3)*c(3) = 0 that is the incidence relation
ans = -7.2760e-12 ans = 3.6380e-12
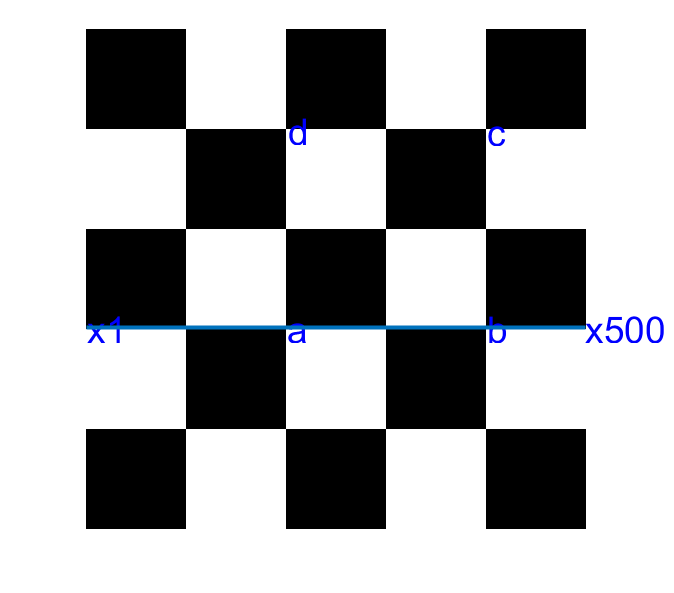
intersect these lines with the image borders
-> l: ax + by + c = 0; first column (c1) x = 1 -> a = 1, b = 0, c = -1 (remember that the first coordinate in matlab is the row, the second the column.
r1 = [0; 1; -1]; % parameters of top-most row r500 = [0; 1; -500]; % parameters of bottom row c1 = [1; 0; -1]; % parameters of left-most column c500 = [1; 0; -500]; % parameters of right-most column % compute the intersection between lab and the first column x1 = cross(c1, lab); % point in homogeneous coordinates x1 = x1/x1(3); % this normalization is required to plot the point over the Euclidean plan % bear in mind that x1 and \lamda x1 \forall \lambda ~= 0 are equivalent in P^2 % to draw the point in the image plane, we need to take the point corresponding to x1 having third component % equal to 1 text(x1(1), x1(2), 'x1', 'FontSize', FNT_SZ, 'Color', 'b') % do the same with the right most column x500 = cross(c500, lab); x500 = x500 / x500(3); text(x500(1), x500(2), 'x500', 'FontSize', FNT_SZ, 'Color', 'b') plot([x1(1), x500(1)],[x1(2), x500(2)], 'LineWidth', 3)
compute the angles on these images
computeEuclideanAngles(lab, lac) % 45 degrees computeEuclideanAngles(lab, lcd) % parallel computeEuclideanAngles(lab, lad) % orghogonal
ans = 44.4242 ans = 179.7135 ans = 89.7106
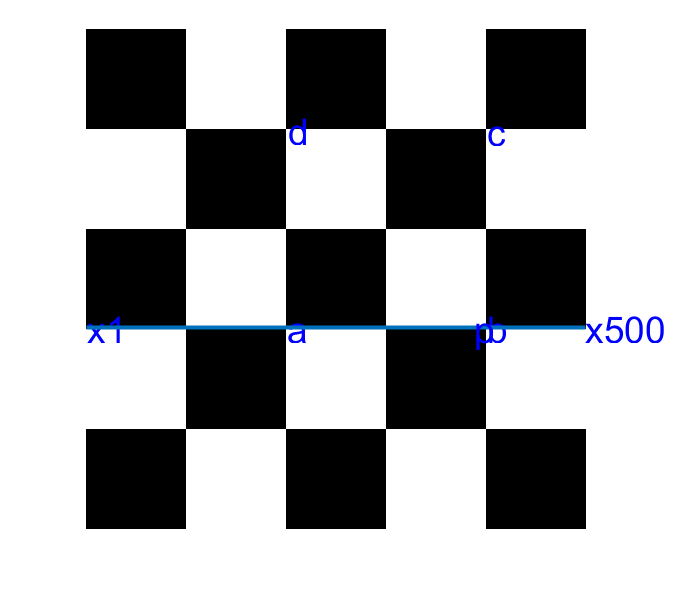
Verify the proporty any linear combination of a,b belongs to lab
lambda = rand(1); mu = 1- lambda; % this is a convex combination. So points will be in between the two. The result holds for any combination p = lambda * a + mu * b; p' * lab p = p/p(3); text(p(1), p(2), 'p', 'FontSize', FNT_SZ, 'Color', 'b')
ans = -2.1828e-11
intersect parallel lines
vac = cross(lab, lcd) vac = vac / vac(3) % look at this point, isn't it strange? It is a point at the infinity! vab = cross(r1, r500) vad = cross(c1, c500) hold off
vac =
1.0e+06 *
-8.0002
-0.0601
-0.0002
vac =
1.0e+04 *
3.9802
0.0299
0.0001
vab =
-499
0
0
vad =
0
499
0